Sự phát triển vượt bậc của trí tuệ nhân tạo, học máy và các hệ thống tự động hóa đã mở ra kỷ nguyên mới, nơi máy móc không chỉ thay thế sức lao động chân tay mà còn thực hiện các tác vụ phức tạp với độ chính xác và hiệu quả cao hơn con người. Trong các dây chuyền sản xuất hiện đại, việc tự động hóa không còn là một lựa chọn mà đã trở thành yêu cầu bắt buộc để nâng cao năng lực cạnh tranh, giảm thiểu chi phí và đáp ứng nhu cầu thị trường ngày càng biến động. Và giữa vô vàn các giải pháp tự động hóa, cánh tay robot gắp sản phẩm nổi lên như một công cụ đa năng và hiệu quả. Ở bài viết này, hãy cùng Robotic Nguyên Hạnh khám phá chi tiết hơn về thiết bị này nhé!
Cánh tay Robot gắp sản phẩm là gì?

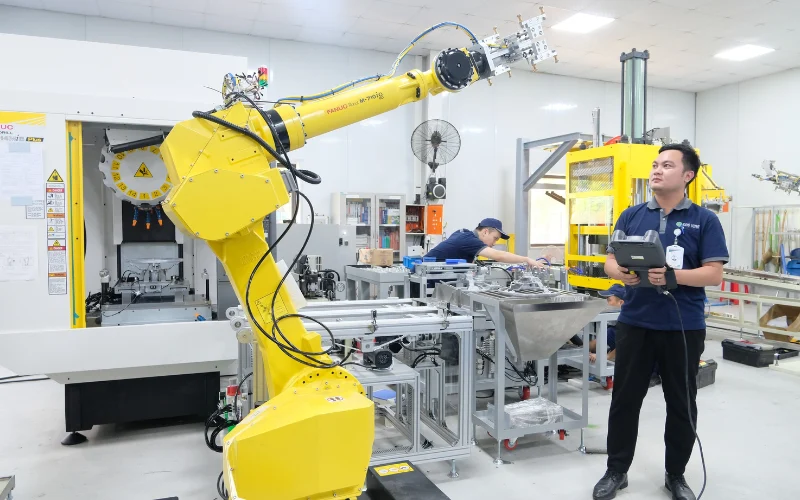
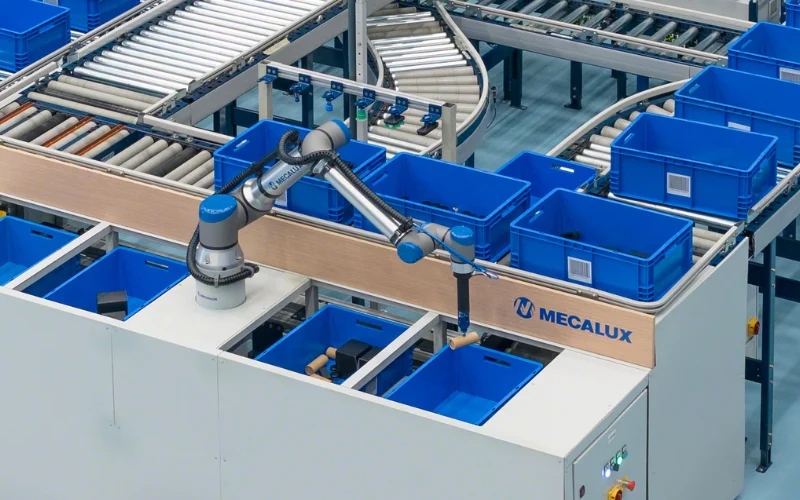
Cánh tay robot gắp sản phẩm là một loại robot công nghiệp được thiết kế chuyên biệt để thực hiện các tác vụ gắp, di chuyển và định vị sản phẩm hoặc vật liệu trong môi trường sản xuất. Về bản chất, nó là một hệ thống tự động hóa, có khả năng thực hiện các chuyển động lặp đi lặp lại với độ chính xác cao mà không cần sự can thiệp liên tục của con người.
Mục đích chính của cánh tay robot này là tối ưu hóa quy trình sản xuất bằng cách tự động hóa các công đoạn gắp, đặt (pick-and-place), phân loại, đóng gói hay cấp liệu. Nó giúp thay thế sức lao động con người ở những vị trí đòi hỏi sự lặp lại, tốc độ cao, hoặc trong các môi trường nguy hiểm, độc hại, từ đó nâng cao năng suất, cải thiện chất lượng sản phẩm và giảm thiểu chi phí vận hành.
Lợi ích khi triển khai cánh tay Robot gắp sản phẩm

- Tăng năng suất vượt trội: Robot có thể hoạt động liên tục 24/7 mà không cần nghỉ ngơi, không bị ảnh hưởng bởi mệt mỏi hay ca kíp. Chúng thực hiện các thao tác với tốc độ cao và đồng đều, giúp gia tăng đáng kể sản lượng sản phẩm trong cùng một khoảng thời gian.
- Nâng cao chất lượng và độ chính xác: Với khả năng lặp lại chuyển động với độ chính xác micromet, cánh tay robot loại bỏ hoàn toàn lỗi do con người, giảm thiểu tối đa phế phẩm và đảm bảo chất lượng sản phẩm đầu ra đồng nhất. Điều này đặc biệt quan trọng trong các ngành đòi hỏi độ chính xác cao như điện tử, y tế.
- Giảm thiểu chi phí vận hành: Mặc dù chi phí đầu tư ban đầu cao, nhưng về lâu dài, robot giúp tiết kiệm đáng kể chi phí nhân công, đặc biệt trong các công việc lặp lại, đơn điệu hoặc nguy hiểm. Ngoài ra, việc giảm phế phẩm và tối ưu hóa quy trình cũng góp phần cắt giảm chi phí sản xuất tổng thể.
- Cải thiện môi trường làm việc và an toàn lao động: Robot có thể thay thế con người thực hiện các nhiệm vụ trong môi trường độc hại (hóa chất, bụi bẩn), nguy hiểm (nhiệt độ cao, vật nặng) hoặc đơn điệu, giúp bảo vệ sức khỏe và tính mạng của người lao động. Điều này cho phép nhân viên tập trung vào các công việc có giá trị cao hơn, đòi hỏi tư duy và kỹ năng.
- Tăng tính linh hoạt trong sản xuất: Khi thay đổi loại sản phẩm hoặc quy trình, việc điều chỉnh chương trình cho cánh tay robot thường nhanh chóng và dễ dàng hơn so với việc đào tạo lại nhân công thủ công. Điều này giúp doanh nghiệp thích ứng nhanh hơn với sự biến động của thị trường và nhu cầu khách hàng.
- Tối ưu hóa không gian làm việc: Nhiều loại cánh tay robot có thiết kế nhỏ gọn, có thể hoạt động hiệu quả trong không gian hạn chế, giúp tối ưu hóa diện tích nhà xưởng và bố trí dây chuyền sản xuất hợp lý hơn.
Cấu tạo và nguyên lý hoạt động của cánh tay Robot gắp sản phẩm
Cấu tạo chính

Một cánh tay robot gắp sản phẩm điển hình được cấu thành từ nhiều bộ phận quan trọng, hoạt động đồng bộ để thực hiện các tác vụ một cách hiệu quả. Các thành phần chính bao gồm:
Thân robot (Cánh tay)
Đây là phần khung xương và cơ bắp của robot, bao gồm một chuỗi các khớp nối và liên kết cơ khí.
- Các khớp nối (Joints): Tương tự như khớp xương ở con người, các khớp này cho phép cánh tay robot xoay, uốn cong và vươn tới các vị trí khác nhau trong không gian làm việc. Số lượng khớp thường quyết định độ linh hoạt (số trục – degrees of freedom) của robot. Robot 4 trục thường dùng cho các tác vụ đơn giản, robot 6 trục phổ biến và linh hoạt nhất, có thể tiếp cận mọi hướng.
- Cấu trúc cơ khí: Được chế tạo từ các vật liệu bền vững (như thép, nhôm), đảm bảo độ cứng vững và khả năng chịu tải. Bên trong là hệ thống motor (động cơ), hộp số và các cơ cấu truyền động giúp cánh tay di chuyển mượt mà và chính xác.
Bộ phận kẹp/gắp (End-effector/Gripper)
Đây là “bàn tay” của robot, được gắn ở đầu cánh tay và là bộ phận trực tiếp tương tác với sản phẩm. Việc lựa chọn loại kẹp phụ thuộc vào hình dạng, kích thước, trọng lượng và vật liệu của sản phẩm cần gắp.
- Kẹp cơ khí (Mechanical Gripper): Sử dụng các ngón kẹp (thường là 2 hoặc 3 ngón) để ôm và giữ sản phẩm bằng lực ma sát hoặc hình dáng.
- Kẹp 2 ngón: Phổ biến nhất, phù hợp với nhiều loại sản phẩm có hình dạng xác định.
- Kẹp 3 ngón hoặc đa ngón: Giúp kẹp chặt và ổn định hơn với các vật thể tròn hoặc có hình dạng phức tạp.
- Kẹp chân không (Vacuum Gripper): Sử dụng lực hút chân không thông qua các giác hút để nâng và di chuyển sản phẩm. Loại này lý tưởng cho các bề mặt phẳng, nhẵn, hoặc vật liệu mỏng (ví dụ: tấm kim loại, hộp carton, túi nhựa).
- Kẹp từ tính (Magnetic Gripper): Dùng lực từ để gắp các sản phẩm làm từ vật liệu sắt từ (kim loại có từ tính). Thích hợp cho các sản phẩm kim loại có hình dạng bất kỳ, miễn là chúng nhiễm từ.
- Các loại kẹp chuyên dụng khác: Tùy thuộc vào yêu cầu cụ thể của sản phẩm và quy trình (ví dụ: kẹp cho vải, kẹp cho vật liệu mềm, kẹp có đệm khí…).
Hệ thống điều khiển
Đây là “bộ não” của robot, chịu trách nhiệm tiếp nhận lệnh, xử lý thông tin và điều khiển toàn bộ hoạt động của cánh tay.
- Bộ điều khiển (Controller): Là một máy tính công nghiệp chuyên dụng chứa phần cứng và phần mềm điều khiển. Nó tính toán các quỹ đạo chuyển động, điều khiển các động cơ và phối hợp hoạt động của các bộ phận khác.
- Phần mềm lập trình: Cho phép người dùng viết các chương trình để robot thực hiện các chuỗi tác vụ. Các ngôn ngữ lập trình robot thường trực quan, dễ học.
- Giao diện người máy (HMI – Human-Machine Interface): Màn hình cảm ứng hoặc bảng điều khiển giúp người vận hành theo dõi trạng thái, nhập liệu và điều chỉnh các thông số của robot.
Hệ thống cảm biến (Tùy chọn)
Mặc dù không phải lúc nào cũng là bộ phận bắt buộc, các cảm biến đóng vai trò ngày càng quan trọng, giúp robot hoạt động thông minh và linh hoạt hơn.
- Cảm biến thị giác (Vision System): Bao gồm camera và phần mềm xử lý ảnh. Hệ thống này cho phép robot “nhìn” và nhận diện sản phẩm, xác định vị trí, định hướng hoặc thậm chí kiểm tra chất lượng. Đây là yếu tố then chốt cho các ứng dụng gắp ngẫu nhiên (bin picking) hoặc các sản phẩm không nằm ở vị trí cố định.
- Cảm biến lực/mô-men xoắn: Gắn ở cổ tay hoặc các khớp, giúp robot cảm nhận lực tác động khi tương tác với sản phẩm hoặc môi trường, từ đó điều chỉnh chuyển động cho phù hợp (ví dụ: gắp vật dễ vỡ).
- Cảm biến tiệm cận, quang điện: Phát hiện sự hiện diện của vật thể trong phạm vi gần, dùng để xác nhận sản phẩm đã đến vị trí hoặc đảm bảo an toàn.
Sự kết hợp hài hòa giữa các bộ phận này tạo nên một hệ thống cánh tay robot gắp sản phẩm hoàn chỉnh, có khả năng tự động hóa và tối ưu hóa nhiều công đoạn trong sản xuất công nghiệp.
Nguyên lý hoạt động
Nguyên lý hoạt động của một cánh tay robot gắp sản phẩm là một chuỗi các bước tuần tự, được lập trình sẵn hoặc điều khiển thông qua các hệ thống cảm biến thông minh. Dưới đây là các giai đoạn chính trong quá trình hoạt động:
Tiếp nhận tín hiệu và xử lý
Mọi chu trình gắp sản phẩm đều bắt đầu bằng việc tiếp nhận tín hiệu. Tín hiệu này có thể đến từ:
- Hệ thống điều khiển trung tâm: Khi có lệnh từ bộ điều khiển chính của dây chuyền sản xuất (ví dụ: “có sản phẩm mới đến vị trí gắp”).
- Cảm biến: Một cảm biến quang điện hoặc cảm biến tiệm cận phát hiện sự hiện diện của sản phẩm tại điểm gắp.
- Hệ thống thị giác (Vision System): Camera chụp ảnh khu vực làm việc và gửi dữ liệu về bộ xử lý hình ảnh.
Sau khi tín hiệu được tiếp nhận, bộ điều khiển của robot sẽ xử lý thông tin để xác định hành động tiếp theo.
Xác định vị trí và đối tượng
Đây là bước cực kỳ quan trọng để đảm bảo độ chính xác.
- Với các ứng dụng đơn giản (vị trí cố định): Robot được lập trình sẵn tọa độ chính xác của sản phẩm. Nó chỉ cần di chuyển đến tọa độ đó và thực hiện thao tác gắp.
- Với các ứng dụng phức tạp hơn (sản phẩm không cố định): Hệ thống cảm biến thị giác phát huy vai trò. Camera chụp ảnh sản phẩm, phần mềm xử lý hình ảnh sẽ phân tích ảnh để:
- Nhận diện: Xác định loại sản phẩm.
- Định vị: Tính toán chính xác tọa độ (X,Y,Z) và hướng của sản phẩm trong không gian 3D.
- Kiểm tra chất lượng (tùy chọn): Đảm bảo sản phẩm đạt tiêu chuẩn trước khi gắp.
Di chuyển và định vị
Dựa trên thông tin vị trí sản phẩm, bộ điều khiển sẽ tính toán quỹ đạo di chuyển tối ưu cho cánh tay robot.
- Cánh tay robot bắt đầu di chuyển từ vị trí chờ hoặc vị trí đặt sản phẩm trước đó.
- Các động cơ tại mỗi khớp sẽ hoạt động theo lệnh của bộ điều khiển, đưa đầu cuối (End-effector) của cánh tay đến sát vị trí của sản phẩm. Quá trình này được thực hiện với độ chính xác cao, đảm bảo không va chạm với các vật cản và đến đúng điểm gắp.
Thực hiện thao tác gắp
Khi cánh tay robot đã định vị chính xác phía trên hoặc xung quanh sản phẩm, bộ phận kẹp (gripper) sẽ được kích hoạt.
- Kẹp cơ khí: Các ngón kẹp đóng lại, tạo lực giữ sản phẩm. Lực kẹp thường được điều chỉnh để không làm hỏng sản phẩm.
- Kẹp chân không: Bơm chân không được kích hoạt, tạo ra lực hút qua các giác hút để nâng sản phẩm lên.
- Kẹp từ tính: Lực từ được kích hoạt để hút sản phẩm kim loại.
Robot sẽ xác nhận rằng sản phẩm đã được gắp thành công (ví dụ: thông qua cảm biến áp suất, cảm biến lực, hoặc kiểm tra thị giác).
Di chuyển và đặt sản phẩm
Sau khi gắp thành công, cánh tay robot sẽ nâng sản phẩm lên khỏi vị trí ban đầu và di chuyển theo quỹ đạo được lập trình đến vị trí đích.
- Vị trí đích có thể là một khay đóng gói, một băng chuyền khác, một máy gia công tiếp theo, hoặc một vị trí kiểm tra.
- Quỹ đạo di chuyển này cũng được tính toán kỹ lưỡng để đảm bảo an toàn và hiệu quả, tránh các chướng ngại vật trên đường đi.
Thả sản phẩm
Khi đến vị trí đích, bộ phận kẹp sẽ nhả sản phẩm ra.
- Kẹp cơ khí: Các ngón kẹp mở ra.
- Kẹp chân không: Bơm chân không ngắt hoặc đảo chiều áp suất để giải phóng lực hút.
- Kẹp từ tính: Lực từ bị ngắt.
Sản phẩm được đặt một cách nhẹ nhàng và chính xác vào vị trí mong muốn.
Trở về vị trí ban đầu
Sau khi hoàn thành chu trình gắp và đặt, cánh tay robot sẽ di chuyển trở lại vị trí chờ (home position), sẵn sàng để bắt đầu một chu trình mới khi nhận được tín hiệu tiếp theo.Quá trình này lặp lại liên tục, cho phép cánh tay robot gắp và di chuyển hàng nghìn sản phẩm mỗi ngày với độ đồng đều và chính xác vượt trội so với lao động thủ công.
Các loại cánh tay Robot gắp sản phẩm phổ biến
Robot cộng tác (Cobot)
- Đặc điểm: Robot cộng tác, hay còn gọi là cobot, được thiết kế đặc biệt để làm việc an toàn và trực tiếp cùng với con người mà không cần hàng rào bảo vệ. Chúng thường có cảm biến lực và mô-men xoắn tích hợp, cho phép dừng lại ngay lập tức khi phát hiện va chạm. Cobot nổi bật với khả năng lập trình dễ dàng (thường thông qua việc kéo tay robot để dạy vị trí – “lead-through programming”) và sự linh hoạt cao trong việc tái cấu hình cho các tác vụ khác nhau.
- Ứng dụng: Cobot lý tưởng cho các công việc gắp đặt sản phẩm nhẹ, công việc lặp lại, và các quy trình cần sự phối hợp giữa người và máy, như gắp linh kiện vào hộp, đóng gói sản phẩm nhỏ, hoặc hỗ trợ lắp ráp.
Robot khớp nối (Articulated Robot)
- Đặc điểm: Đây là loại robot công nghiệp phổ biến nhất, được lấy cảm hứng từ cấu trúc cánh tay người. Robot khớp nối có từ 4 đến 6 (hoặc hơn) trục chuyển động, cho phép chúng đạt được tầm với rộng và sự linh hoạt cao trong không gian làm việc. Chúng có khả năng thực hiện các chuyển động phức tạp và đa dạng.
- Ứng dụng: Với sự linh hoạt vượt trội, robot khớp nối được sử dụng rộng rãi để gắp và di chuyển các sản phẩm có trọng lượng và hình dạng đa dạng, từ các bộ phận ô tô nặng đến các sản phẩm điện tử, trong các quy trình hàn, sơn, hoặc lắp ráp phức tạp.
Robot SCARA (Selective Compliance Assembly Robot Arm)
- Đặc điểm: Robot SCARA chuyên biệt trong các chuyển động theo phương ngang, có độ cứng vững cao theo chiều dọc và linh hoạt theo chiều ngang. Chúng nổi bật với tốc độ cao và độ chính xác tốt cho các thao tác trong mặt phẳng X-Y. Cấu trúc của robot SCARA thường bao gồm hai khớp quay song song, giúp nó di chuyển nhanh chóng và hiệu quả.
- Ứng dụng: Robot SCARA cực kỳ hiệu quả trong các ứng dụng “pick-and-place” (gắp và đặt) tốc độ cao, gắp và lắp ráp các chi tiết nhỏ, hoặc sắp xếp linh kiện trên bảng mạch in (PCB) trong ngành điện tử.
Robot Delta (Parallel Robot)
- Đặc điểm: Robot Delta, còn gọi là robot song song, có cấu trúc độc đáo với ba hoặc nhiều cánh tay nối song song với một nền tảng chung. Thiết kế này mang lại tốc độ cực cao và độ chính xác vượt trội, đặc biệt khi xử lý các vật thể nhẹ. Phần lớn khối lượng động cơ được đặt ở nền cố định, giúp giảm quán tính và tăng tốc độ di chuyển của phần đầu gắp.
- Ứng dụng: Do tốc độ và độ chính xác cao, robot Delta thường được tìm thấy trong các ngành công nghiệp đòi hỏi tốc độ đóng gói và phân loại sản phẩm nhanh chóng, như đóng gói thực phẩm, dược phẩm, hoặc gắp các vật thể nhỏ trên băng tải tốc độ cao.
Các ứng dụng thực tiễn của cánh tay Robot gắp sản phẩm
Cánh tay robot gắp sản phẩm đã trở thành một công cụ không thể thiếu trong nhiều ngành công nghiệp, mang lại hiệu quả vượt trội trong các quy trình sản xuất và logistics. Khả năng hoạt động chính xác, liên tục và linh hoạt cho phép chúng đảm nhận một loạt các tác vụ đa dạng. Dưới đây là một số ứng dụng tiêu biểu:
Ngành điện tử
Trong ngành công nghiệp điện tử, nơi yêu cầu độ chính xác cực cao và xử lý các linh kiện siêu nhỏ, cánh tay robot gắp sản phẩm là giải pháp tối ưu:
- Lắp ráp linh kiện: Gắp và đặt các chip, bảng mạch in (PCB), tụ điện, và các linh kiện điện tử khác vào đúng vị trí trên bo mạch hoặc sản phẩm cuối cùng.
- Kiểm tra và thử nghiệm: Di chuyển sản phẩm qua các trạm kiểm tra tự động hoặc gắp để đưa vào các thiết bị thử nghiệm.
- Đóng gói sản phẩm: Gắp và sắp xếp các sản phẩm điện tử nhỏ vào khay, hộp hoặc vỉ.
Ngành ô tô

Ngành công nghiệp ô tô là một trong những nơi đầu tiên ứng dụng robot rộng rãi. Cánh tay robot gắp sản phẩm đóng vai trò quan trọng trong việc xử lý các bộ phận có kích thước và trọng lượng khác nhau:
- Gắp và cấp liệu chi tiết: Di chuyển các bộ phận kim loại, nhựa, hoặc composite từ băng chuyền đến các máy gia công (ví dụ: máy ép, máy hàn, máy cắt).
- Hàn và sơn: Mặc dù chuyên biệt hơn, nhiều cánh tay robot được trang bị bộ phận gắp để giữ cố định các bộ phận trong quá trình hàn hoặc sơn tự động.
- Lắp ráp phụ tùng: Gắp và định vị các cụm chi tiết như động cơ, hộp số, hoặc các bộ phận nội thất trong quá trình lắp ráp xe.
Ngành thực phẩm và đồ uống
Trong môi trường đòi hỏi vệ sinh cao và tốc độ sản xuất lớn, cánh tay robot mang lại lợi ích đáng kể:
- Đóng gói: Gắp và xếp sản phẩm thực phẩm (ví dụ: bánh, kẹo, chai nước, hộp sữa) vào bao bì, thùng carton.
- Phân loại: Nhờ hệ thống thị giác, robot có thể phân loại thực phẩm theo kích thước, hình dạng hoặc màu sắc.
- Xử lý sản phẩm tươi sống: Gắp và sắp xếp các loại rau củ, thịt cá một cách nhẹ nhàng, giảm thiểu hư hại và đảm bảo vệ sinh.
- Xếp pallet: Tự động hóa quá trình xếp các thùng hàng lên pallet để vận chuyển.
Ngành dược phẩm
Độ chính xác và tuân thủ các quy định nghiêm ngặt là ưu tiên hàng đầu trong ngành dược phẩm:
- Đóng gói thuốc: Gắp và đặt viên thuốc, lọ thuốc, ống tiêm vào vỉ, hộp một cách chính xác.
- Kiểm tra chất lượng: Di chuyển mẫu đến các trạm kiểm tra, hoặc gắp sản phẩm lỗi ra khỏi dây chuyền.
- Xử lý nguyên liệu: Gắp và chuyển các nguyên liệu thô hoặc thành phẩm trong môi trường phòng sạch.
Ngành logistics và kho bãi

Robot gắp sản phẩm ngày càng trở nên quan trọng trong các trung tâm phân phối và kho hàng tự động:
- Sắp xếp và phân loại hàng hóa: Gắp các kiện hàng từ băng chuyền và đặt vào các vị trí lưu trữ hoặc chuẩn bị cho khâu vận chuyển.
- Bốc dỡ hàng hóa: Hỗ trợ bốc dỡ hàng từ container hoặc xe tải.
- Gắp hàng theo đơn (Order Picking): Trong các kho tự động, robot có thể gắp từng mặt hàng cụ thể theo đơn đặt hàng của khách.
Ngoài ra, cánh tay robot gắp sản phẩm còn được ứng dụng rộng rãi trong các ngành khác như dệt may, nhựa, kim loại, vật liệu xây dựng, v.v., chứng tỏ tính linh hoạt và khả năng thích ứng cao với nhiều môi trường và loại hình sản xuất khác nhau.
Có thể thấy, cánh tay robot gắp sản phẩm không chỉ là một công cụ tự động hóa đơn thuần mà đã trở thành một yếu tố then chốt trong bối cảnh sản xuất hiện đại. Nó không chỉ là một xu hướng, mà là một phần không thể tách rời của tương lai sản xuất, hứa hẹn mang đến những đột phá mạnh mẽ hơn nữa cho các doanh nghiệp và nền kinh tế. Hy vọng những chia sẻ trên đây mang lại hữu ích dành cho bạn. Nếu bạn muốn tìm hiểu thêm về giải pháp tự động hóa cho doanh nghiệp mình, hãy liên hệ ngay Robotic Nguyên Hạnh qua hotline: 0909 664 233 để nhận tư vấn chi tiết từ chuyên gia nhé!