Làm thế nào để tăng cường độ chính xác và hiệu quả trong các dây chuyền sản xuất hiện đại? Câu trả lời có thể nằm ở việc ứng dụng các giải pháp tự động hóa thông minh, trong đó Robot Cartesian đóng vai trò then chốt. Với khả năng di chuyển theo ba trục vuông góc độc lập, chúng mang lại sự linh hoạt và độ tin cậy cao cho nhiều ứng dụng khác nhau. Ở bài viết này, hãy cùng Robotic Nguyên Hạnh khám phá cấu tạo, nguyên lý hoạt động, những lợi ích, cũng như các ứng dụng tiêu biểu của Robot Cartesian trong thực tế nhé.
Robot Cartesian là gì?
Robot Cartesian, hay còn gọi là robot cổng (gantry robot) hoặc robot tuyến tính, là một loại robot công nghiệp có ba trục di chuyển chính vuông góc với nhau, thường được ký hiệu là trục X, Y và Z. Sự di chuyển dọc theo các trục này tạo ra một không gian làm việc hình chữ nhật hoặc hình hộp.
Cấu tạo và nguyên lý hoạt động
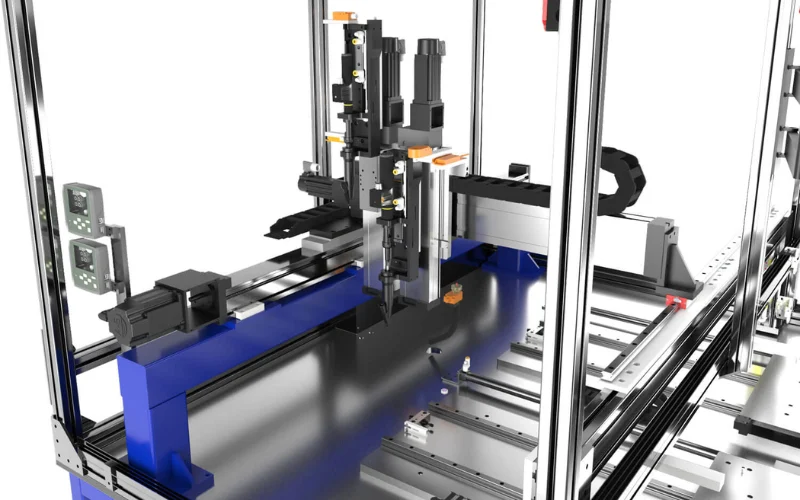
Robot Cartesian sở hữu một cấu trúc cơ khí đặc trưng, được xây dựng dựa trên hệ thống các trục tuyến tính độc lập, thường được bố trí vuông góc với nhau, tương tự như hệ tọa độ Descartes quen thuộc. Cấu trúc này mang lại sự ổn định, độ chính xác cao và khả năng kiểm soát chuyển động dễ dàng.
Cấu trúc cơ khí đặc trưng
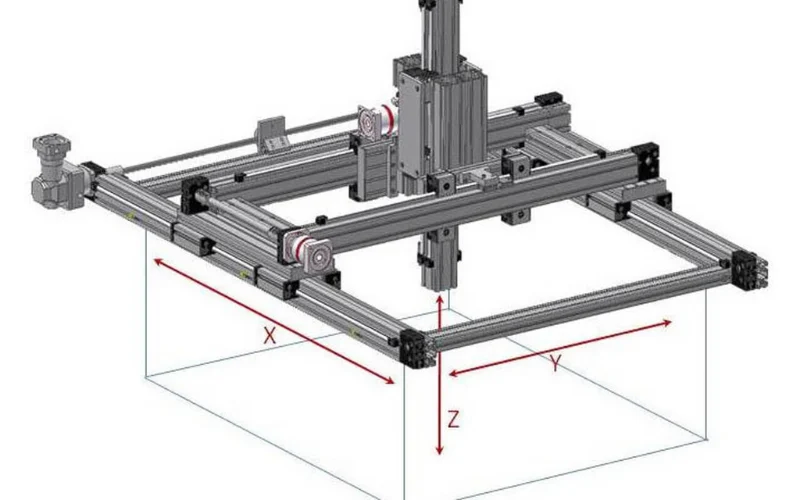
- Hệ thống các trục tuyến tính: Thành phần cốt lõi của Robot Cartesian là hệ thống các trục chuyển động thẳng. Phổ biến nhất là cấu hình 3 trục (X, Y, Z), cho phép robot di chuyển trong không gian ba chiều. Ngoài ra, còn có các cấu hình 2 trục (thường là X, Y hoặc X, Z) cho các ứng dụng phẳng, hoặc các cấu hình phức tạp hơn với nhiều trục hơn để tăng tính linh hoạt hoặc mở rộng không gian làm việc.
- Trục X (Trục ngang): Thường là trục di chuyển chính theo phương ngang.
- Trục Y (Trục dọc): Di chuyển theo phương thẳng đứng.
- Trục Z (Trục sâu/vào-ra): Di chuyển theo phương vuông góc với mặt phẳng XY.
- Khung cơ khí: Các trục tuyến tính được gắn kết với nhau thông qua một khung cơ khí vững chắc. Khung này đảm bảo sự ổn định và độ cứng vững của toàn bộ hệ thống trong quá trình vận hành, đặc biệt khi chịu tải. Vật liệu chế tạo khung thường là nhôm định hình hoặc thép, được lựa chọn dựa trên yêu cầu về tải trọng và độ chính xác.
- Bộ phận chấp hành (End-effector): Gắn ở đầu trục cuối cùng (thường là trục Z), bộ phận chấp hành là công cụ trực tiếp thực hiện các tác vụ. Nó có thể là mỏ kẹp (gripper) để gắp và đặt, đầu phun sơn, đầu hàn, dụng cụ cắt, hoặc bất kỳ công cụ chuyên dụng nào khác tùy thuộc vào ứng dụng cụ thể.
- Hệ thống dẫn hướng: Để đảm bảo chuyển động tuyến tính mượt mà và chính xác, mỗi trục thường được trang bị hệ thống dẫn hướng, ví dụ như ray trượt và con trượt bi. Hệ thống này giúp giảm ma sát và tăng độ ổn định trong quá trình di chuyển.
Nguyên lý hoạt động
Nguyên lý hoạt động của Robot Cartesian dựa trên sự phối hợp nhịp nhàng của các động cơ và hệ thống truyền động để di chuyển từng trục tuyến tính một cách độc lập. Bằng cách điều khiển đồng thời hoặc tuần tự vị trí của từng trục, robot có thể đưa bộ phận chấp hành đến bất kỳ điểm nào trong không gian làm việc của nó.
- Động cơ: Các động cơ điện, thường là động cơ bước hoặc động cơ servo, được sử dụng để tạo ra chuyển động quay. Loại động cơ được lựa chọn sẽ phụ thuộc vào yêu cầu về tốc độ, độ chính xác và tải trọng của từng ứng dụng.
- Hệ thống truyền động: Chuyển động quay của động cơ được chuyển đổi thành chuyển động tuyến tính của các trục thông qua các cơ cấu truyền động khác nhau:
- Vít me bi (Ball screw): Đây là hệ thống truyền động phổ biến nhất trong Robot Cartesian nhờ độ chính xác cao, hiệu suất tốt và khả năng chịu tải lớn. Chuyển động quay của vít được chuyển thành chuyển động thẳng của đai ốc bi, gắn với trục di chuyển.
- Thanh răng – bánh răng (Rack and pinion): Thường được sử dụng cho các trục có chiều dài lớn, hệ thống này cung cấp tốc độ di chuyển cao nhưng độ chính xác có thể thấp hơn so với vít me bi.
- Dây đai và puli (Belt and pulley): Giải pháp kinh tế cho các ứng dụng tải trọng nhẹ và yêu cầu độ chính xác không quá cao.
- Hệ thống điều khiển: Bộ điều khiển trung tâm của robot sẽ nhận lệnh từ người lập trình hoặc hệ thống cấp cao hơn, sau đó tính toán và gửi tín hiệu điều khiển đến các động cơ. Các cảm biến vị trí (ví dụ: encoder) được gắn trên động cơ hoặc trục di chuyển sẽ phản hồi thông tin về vị trí thực tế, tạo thành một vòng kín điều khiển, đảm bảo robot di chuyển đến đúng vị trí mong muốn với độ chính xác cao.
Tóm lại, Robot Cartesian hoạt động dựa trên nguyên tắc cơ bản là điều khiển độc lập chuyển động tuyến tính của các trục vuông góc thông qua sự phối hợp của động cơ và hệ thống truyền động. Sự đơn giản trong cấu trúc này mang lại độ tin cậy cao và dễ dàng trong việc lập trình và bảo trì.
Các loại Robot Cartesian phổ biến
Mặc dù có chung nguyên tắc hoạt động dựa trên hệ thống các trục tuyến tính vuông góc, Robot Cartesian có nhiều biến thể khác nhau về số lượng trục và cấu hình để phù hợp với đa dạng các ứng dụng cụ thể. Dưới đây là một số loại Robot Cartesian phổ biến:
Phân loại dựa trên số lượng trục
- Robot Cartesian 2 trục (2-Axis Cartesian Robot): Loại robot này chỉ có hai trục chuyển động tuyến tính, thường là trục X và Y (để di chuyển trên một mặt phẳng) hoặc trục X và Z (cho chuyển động ngang và lên xuống tại một vị trí cố định theo phương Y).
- Ứng dụng tiêu biểu: Máy vẽ 2D, máy cắt laser/plasma 2D, một số ứng dụng gắp đặt đơn giản trên mặt phẳng.
- Robot Cartesian 3 trục (3-Axis Cartesian Robot): Đây là cấu hình phổ biến nhất, với ba trục vuông góc X, Y, và Z, cho phép robot di chuyển tự do trong không gian ba chiều.
- Ứng dụng tiêu biểu: Máy CNC 3 trục, máy in 3D, các ứng dụng gắp đặt và lắp ráp phức tạp, kiểm tra và đo lường 3D.
- Robot Cartesian 4 trục (4-Axis Cartesian Robot): Bên cạnh ba trục tuyến tính X, Y, Z, loại robot này có thêm một trục quay (thường được gọi là trục A, B hoặc C) quanh một trong các trục tuyến tính. Trục quay này cho phép thay đổi hướng của bộ phận chấp hành.
- Ứng dụng tiêu biểu: Các ứng dụng lắp ráp đòi hỏi việc xoay linh kiện, một số ứng dụng hàn hoặc sơn phủ phức tạp.
- Robot Cartesian nhiều trục hơn (5 trục, 6 trục,…): Mặc dù ít phổ biến hơn, vẫn có những Robot Cartesian được thiết kế với nhiều hơn 4 trục, thường là sự kết hợp của các trục tuyến tính và trục quay. Điều này nhằm tăng tính linh hoạt và khả năng tiếp cận các vị trí phức tạp hơn.
- Ứng dụng tiêu biểu: Các ứng dụng chuyên biệt trong gia công phức tạp hoặc các hệ thống tự động hóa đặc thù.
Phân loại dựa trên cấu hình
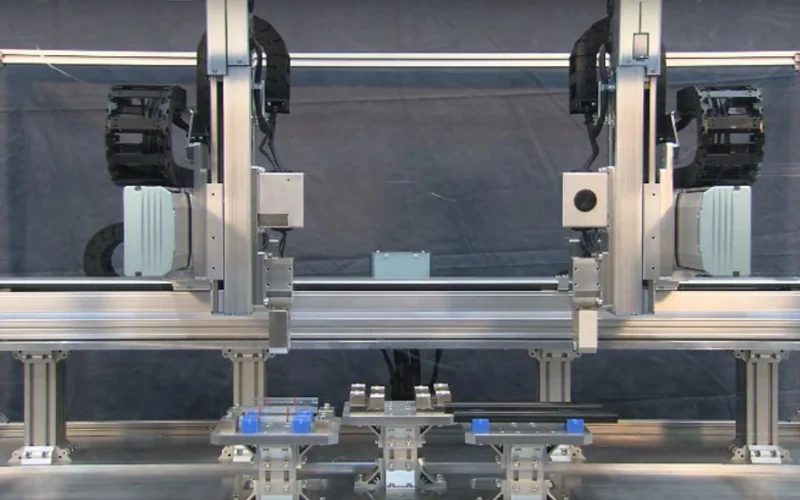
- Robot cổng (Gantry Robot): Trong cấu hình này, bộ phận chấp hành được gắn trên một cầu hoặc cổng di chuyển dọc theo hai trục (thường là X và Y) phía trên khu vực làm việc. Trục Z (và các trục khác nếu có) được gắn trên cầu này để di chuyển lên xuống và vào ra.
- Đặc điểm: Không gian làm việc lớn, khả năng chịu tải cao, thường được sử dụng cho các ứng dụng xử lý vật liệu kích thước lớn hoặc làm việc trên diện rộng.
- Ứng dụng tiêu biểu: Bốc xếp hàng hóa pallet, máy cắt khổ lớn, hệ thống lắp ráp ô tô.
- Robot cầu trục (Bridge Robot): Tương tự như robot cổng, nhưng cấu trúc cầu có thể được hỗ trợ ở nhiều điểm hơn, tăng cường độ ổn định cho các ứng dụng tải trọng cực lớn.
- Đặc điểm: Khả năng chịu tải rất cao, không gian làm việc rộng lớn.
- Ứng dụng tiêu biểu: Xử lý các cấu kiện nặng trong nhà máy thép, nhà máy đóng tàu.
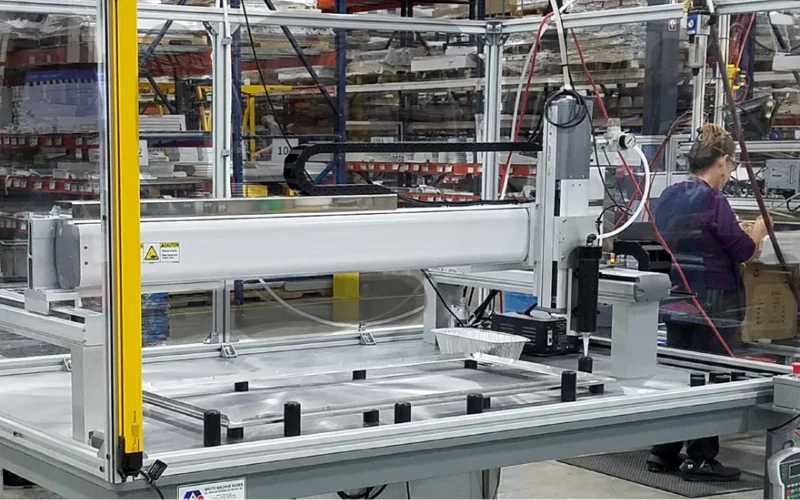
- Robot cánh tay đòn (Cantilever Robot): Trong cấu hình này, một hoặc nhiều trục tuyến tính được gắn trên một cấu trúc đỡ cố định, vươn ra trên khu vực làm việc.
- Đặc điểm: Thiết kế nhỏ gọn, phù hợp cho các ứng dụng có không gian hạn chế.
- Ứng dụng tiêu biểu: Gắp đặt linh kiện trong các máy móc tự động, cấp phôi cho các công đoạn sản xuất.
Có thể bạn quan tâm: Các loại Robot công nghiệp được ứng dụng phổ biến hiện nay
Lợi ích khi sử dụng Robot Cartesian
- Độ chính xác và độ lặp lại cao: Nhờ cấu trúc tuyến tính đơn giản và hệ thống dẫn hướng chính xác, Robot Cartesian thường đạt được độ chính xác và độ lặp lại rất cao trong các thao tác. Điều này đặc biệt quan trọng trong các ứng dụng đòi hỏi sự tỉ mỉ và đồng nhất, chẳng hạn như lắp ráp linh kiện điện tử hoặc kiểm tra chất lượng.
- Khả năng chịu tải lớn: Với khung sườn vững chắc và cơ cấu truyền động mạnh mẽ (đặc biệt là vít me bi hoặc thanh răng – bánh răng), Robot Cartesian có khả năng xử lý các tải trọng tương đối lớn một cách ổn định và an toàn.
- Không gian làm việc hình chữ nhật/hình hộp dễ xác định và tận dụng: Không gian làm việc được giới hạn bởi phạm vi di chuyển của ba trục X, Y, Z, tạo thành một hình chữ nhật hoặc hình hộp rõ ràng. Điều này giúp việc bố trí thiết bị, lập kế hoạch di chuyển và tối ưu hóa không gian làm việc trở nên dễ dàng hơn so với các loại robot có không gian làm việc phức tạp.
- Dễ dàng lập trình và điều khiển: Chuyển động dọc theo các trục tọa độ vuông góc trực quan và dễ hiểu, giúp cho việc lập trình quỹ đạo di chuyển và điều khiển robot trở nên đơn giản hơn so với các robot có khớp xoay. Các ngôn ngữ lập trình robot thường cung cấp các lệnh di chuyển tuyến tính trực tiếp cho các trục X, Y, Z.
- Chi phí đầu tư ban đầu thường thấp hơn so với một số loại robot khác: So với các robot có cấu trúc phức tạp hơn như robot khớp nối, Robot Cartesian thường có chi phí thiết kế và chế tạo thấp hơn, dẫn đến chi phí đầu tư ban đầu có thể cạnh tranh hơn cho một số ứng dụng nhất định.
- Kết cấu vững chắc, dễ bảo trì: Cấu trúc cơ khí đơn giản với ít bộ phận chuyển động phức tạp hơn giúp Robot Cartesian có độ bền cao và dễ dàng bảo trì, sửa chữa khi cần thiết. Việc tiếp cận các bộ phận để bảo dưỡng cũng thường thuận tiện hơn.
Ứng dụng của Robot Cartesian trong các ngành công nghiệp

Sản xuất
- Gắp và đặt linh kiện (Pick and Place): Đây là một trong những ứng dụng phổ biến nhất của Robot Cartesian. Chúng được sử dụng để gắp các linh kiện từ băng tải, khay chứa hoặc các thiết bị cấp liệu khác và đặt chúng vào vị trí chính xác trên dây chuyền lắp ráp, máy móc gia công hoặc bao bì sản phẩm. Độ chính xác cao của Robot Cartesian đảm bảo việc định vị linh kiện một cách nhất quán.
- Lắp ráp: Robot Cartesian được tích hợp vào các dây chuyền lắp ráp tự động để thực hiện các công đoạn như siết ốc vít, lắp ráp các bộ phận nhỏ, hoặc định vị các thành phần lớn hơn một cách chính xác. Khả năng di chuyển theo các trục vuông góc giúp chúng dễ dàng thực hiện các thao tác lắp ráp theo trình tự.
- Hàn điểm, hàn hồ quang: Trong ngành công nghiệp ô tô và các ngành sản xuất kim loại khác, Robot Cartesian được trang bị súng hàn để thực hiện các mối hàn điểm hoặc hàn hồ quang một cách nhanh chóng và chính xác. Khả năng di chuyển ổn định và lặp lại quỹ đạo hàn giúp đảm bảo chất lượng mối hàn đồng đều.
- Sơn phủ: Robot Cartesian được sử dụng trong các hệ thống sơn tự động để phun sơn, keo hoặc các lớp phủ khác lên bề mặt sản phẩm. Khả năng kiểm soát tốc độ và quỹ đạo phun giúp tạo ra lớp phủ đều và chất lượng cao.
- Cắt gọt: Trong các ứng dụng gia công cơ khí, Robot Cartesian có thể được trang bị các công cụ cắt (ví dụ: dao phay, dao cắt laser) để thực hiện các thao tác cắt, phay, khoan trên các vật liệu khác nhau. Độ cứng vững của cấu trúc giúp đảm bảo độ chính xác trong quá trình gia công.
- Kiểm tra chất lượng: Robot Cartesian được trang bị các cảm biến (ví dụ: camera, cảm biến đo lường) để thực hiện các quy trình kiểm tra chất lượng tự động. Chúng có thể di chuyển cảm biến đến các vị trí cần kiểm tra một cách chính xác và thu thập dữ liệu để đánh giá chất lượng sản phẩm.
Kho vận và Logistics
- Bốc xếp hàng hóa: Robot cổng Cartesian có kích thước lớn thường được sử dụng trong các kho bãi và trung tâm phân phối để bốc xếp hàng hóa từ pallet lên xe tải hoặc ngược lại. Khả năng chịu tải lớn giúp chúng xử lý các kiện hàng nặng một cách hiệu quả.
- Phân loại và đóng gói: Trong các hệ thống phân loại hàng hóa tự động, Robot Cartesian có thể được sử dụng để gắp các sản phẩm từ băng tải và đặt chúng vào các thùng carton hoặc các vị trí phân loại khác nhau. Chúng cũng được tích hợp vào các dây chuyền đóng gói để thực hiện các thao tác như gấp hộp, dán nhãn và xếp sản phẩm vào thùng.
Y tế
- Hỗ trợ phẫu thuật: Trong lĩnh vực y tế, các Robot Cartesian có độ chính xác cao được sử dụng để hỗ trợ các bác sĩ phẫu thuật trong các ca phẫu thuật phức tạp, ví dụ như phẫu thuật thần kinh hoặc phẫu thuật chỉnh hình. Chúng có thể thực hiện các chuyển động nhỏ và chính xác theo sự điều khiển của bác sĩ.
- Xử lý mẫu bệnh phẩm: Trong các phòng thí nghiệm y tế, Robot Cartesian được sử dụng để tự động hóa các quy trình xử lý mẫu bệnh phẩm, chẳng hạn như lấy mẫu, pha chế dung dịch và chuyển mẫu giữa các thiết bị phân tích.
Các ứng dụng đặc biệt khác:
- Máy in 3D: Nhiều máy in 3D sử dụng hệ thống điều khiển Cartesian để di chuyển đầu in theo các trục X, Y, và Z, tạo ra các vật thể ba chiều từng lớp một.
- Máy CNC: Robot Cartesian là nền tảng cơ bản cho nhiều loại máy CNC (điều khiển số bằng máy tính) như máy phay CNC, máy tiện CNC, nơi công cụ cắt di chuyển theo các trục tọa độ để gia công vật liệu.
- Hệ thống đo kiểm tự động: Robot Cartesian được sử dụng để di chuyển các đầu dò hoặc cảm biến đo lường đến các vị trí khác nhau trên bề mặt sản phẩm để thực hiện các phép đo kích thước, hình dạng hoặc các thông số khác.
Xem thêm: 5+ ứng dụng robot trong công nghiệp phổ biến
Các yếu tố cần xem xét khi lựa chọn Robot Cartesian
Việc lựa chọn Robot Cartesian phù hợp cho một ứng dụng cụ thể đòi hỏi sự cân nhắc kỹ lưỡng nhiều yếu tố khác nhau. Một quyết định đúng đắn sẽ đảm bảo hiệu suất tối ưu, tiết kiệm chi phí và kéo dài tuổi thọ của hệ thống. Dưới đây là một số yếu tố quan trọng cần xem xét:
- Yêu cầu về không gian làm việc và tầm với: Xác định rõ kích thước và hình dạng của không gian làm việc cần thiết cho ứng dụng. Tầm với của robot (phạm vi di chuyển tối đa theo các trục X, Y, Z) phải đủ để tiếp cận tất cả các vị trí cần thiết trong quy trình làm việc. Cần xem xét cả không gian cần thiết cho các thiết bị ngoại vi và sự di chuyển của robot mà không gây va chạm.
- Tải trọng yêu cầu: Xác định trọng lượng tối đa của vật thể mà robot cần di chuyển, nâng hoặc thao tác. Khả năng chịu tải của robot (payload capacity) phải đủ để đáp ứng yêu cầu này, đồng thời cần tính đến trọng lượng của bộ phận chấp hành và các công cụ khác được gắn trên robot. Việc lựa chọn robot có tải trọng phù hợp sẽ đảm bảo tuổi thọ và hiệu suất hoạt động của robot.
- Độ chính xác và độ lặp lại cần thiết: Yêu cầu về độ chính xác định vị (accuracy) và độ lặp lại (repeatability) của robot sẽ phụ thuộc vào ứng dụng cụ thể. Các ứng dụng lắp ráp chính xác hoặc kiểm tra chất lượng thường đòi hỏi robot có độ chính xác và độ lặp lại rất cao. Cần xem xét thông số kỹ thuật của robot từ nhà sản xuất để đảm bảo chúng đáp ứng được yêu cầu này.
- Tốc độ di chuyển và chu kỳ làm việc: Xác định tốc độ di chuyển cần thiết của robot để đáp ứng yêu cầu về thời gian chu kỳ sản xuất. Chu kỳ làm việc (cycle time) bao gồm thời gian robot thực hiện các thao tác và di chuyển giữa các vị trí. Lựa chọn robot có tốc độ phù hợp sẽ giúp tối ưu hóa năng suất.
- Môi trường làm việc: Các yếu tố môi trường như nhiệt độ, độ ẩm, bụi bẩn, hóa chất hoặc rung động có thể ảnh hưởng đến hiệu suất và tuổi thọ của robot. Cần lựa chọn robot có cấp bảo vệ (IP rating) phù hợp và được thiết kế để hoạt động ổn định trong môi trường làm việc cụ thể.
- Chi phí đầu tư và vận hành: Chi phí đầu tư ban đầu bao gồm giá mua robot, bộ điều khiển và các phụ kiện liên quan. Chi phí vận hành bao gồm chi phí năng lượng, bảo trì, sửa chữa và đào tạo nhân viên. Cần cân nhắc tổng chi phí sở hữu (Total Cost of Ownership – TCO) để đưa ra quyết định kinh tế hiệu quả.
- Yêu cầu về hệ thống điều khiển và tích hợp: Xem xét khả năng tương thích của robot với hệ thống điều khiển hiện có hoặc hệ thống điều khiển mong muốn. Đánh giá tính dễ dàng trong việc lập trình, giao tiếp với các thiết bị ngoại vi (ví dụ: cảm biến, băng tải) và tích hợp vào hệ thống tự động hóa tổng thể.
- Độ tin cậy và tuổi thọ: Lựa chọn nhà sản xuất uy tín với các sản phẩm đã được chứng minh về độ tin cậy và tuổi thọ cao sẽ giúp giảm thiểu thời gian ngừng hoạt động và chi phí bảo trì trong dài hạn.
- Khả năng bảo trì và hỗ trợ kỹ thuật: Đánh giá khả năng cung cấp dịch vụ bảo trì, phụ tùng thay thế và hỗ trợ kỹ thuật từ nhà cung cấp. Thời gian phản hồi nhanh chóng và chất lượng dịch vụ tốt sẽ rất quan trọng khi có sự cố xảy ra.
- Tính linh hoạt và khả năng mở rộng: Nếu có khả năng ứng dụng sẽ thay đổi trong tương lai, hãy xem xét tính linh hoạt và khả năng mở rộng của robot, ví dụ như khả năng thêm trục hoặc thay đổi bộ phận chấp hành.
Tóm lại, Robot Cartesian đã khẳng định vị thế là một giải pháp tự động hóa mạnh mẽ và linh hoạt trong nhiều ngành công nghiệp. Với cấu trúc tuyến tính đơn giản nhưng hiệu quả, chúng mang lại độ chính xác cao, khả năng chịu tải tốt và sự dễ dàng trong lập trình và điều khiển. Những ưu điểm này đã giúp Robot Cartesian trở thành một công cụ không thể thiếu trong các ứng dụng như gắp đặt, lắp ráp, hàn, phun sơn, kiểm tra chất lượng và thậm chí cả trong lĩnh vực y tế và logistics. Nếu bạn muốn tìm hiểu thêm về Robot Cartesian và giải pháp tự động hóa cho doanh nghiệp mình, hãy liên hệ ngay chúng tôi qua hotline: 0909 664 233 để nhận tư vấn chi tiết từ chuyên gia nhé!